Comment de petits mammifères arboricoles saisissent les branches pour se déplacer ? Pour le savoir, une doctorante du Centre de recherche sur la paléobiodiversité et les paléoenvironnements a mis au point un capteur de force aux possibles autres applications en biomécanique et en robotique.
Comment de petits mammifères arboricoles saisissent les branches pour se déplacer ? Pour le savoir, une doctorante du Centre de recherche sur la paléobiodiversité et les paléoenvironnements a mis au point un capteur de force aux possibles autres applications en biomécanique et en robotique.
Une invention réalisée en collaboration avec Artémis Llamosi, à l’époque doctorant au laboratoire Matière et systèmes complexes3.
Développé avec le soutien de la SATT Lutech, le capteur est constitué d’une matrice de cellules déformables, qui détectent l’intensité et la direction des forces avec une résolution millimétrique.
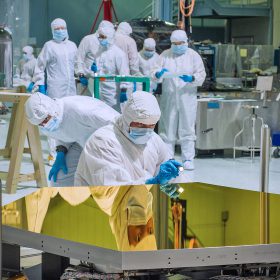
Chaque cellule est fabriquée dans un polymère souple et transparent, qui contient une bille réflectrice. Quatre fibres optiques sont connectées sur la cellule, l’une pour injecter de la lumière vers la bille, les trois autres pour capter la lumière réfléchie et déterminer le déplacement de la bille par triangulation. Un démonstrateur fonctionnel, réalisé en forme de branche, a été testé en conditions réelles au Parc zoologique et botanique de Mulhouse, avec de petits lémuriens (voir photo). Les résultats obtenus, pour des mesures de forces entre 0 et 2,5 newtons (N), correspondent au cahier des charges fixé dans le cadre de la thèse sur l’évolution des primates.
Mais d’autres plages de mesures sont possibles, en faisant varier la dureté du polymère. Et surtout, le même principe permet de réaliser des capteurs de différentes formes. Il est donc possible d’utiliser ce type de mesure pour étudier d’autres animaux. Mais aussi de transférer la technologie vers des secteurs très différents comme la biomécanique, la podologie, et même la robotique.
En effet, la cobotique, qui associe le travail d’un homme et d’un robot, exige que ce dernier ait une perception fine de ses contacts avec les humains. Un démonstrateur « industriel » a déjà été fabriqué, afin de montrer les capacités de la technologie aux industriels intéressés. En parallèle Séverine Toussaint prépare un deuxième prototype en forme de branche, de plus gros diamètre. Et commence à analyser les données recueillies avec les animaux, dans le but de mieux comprendre le rôle du pouce opposable et des ongles dans la préhension.
Cet article Un nouveau capteur de force conçu grâce à l’étude des primates est paru initialement sur CNRS News National.
Lire en entier